







 425 / 948
425 / 948

ELECTRONIC STABILITY PROGRAM (ESP)
6
For ESP OFF Condition: (By pressing ESP off
switch)
1. The drive mode function in ESP will not be
active in ESP OFF condition.
2. ESP will not allow the switch state change to
Dynamic or Rough road mode, even if the
user gives a request for these drive modes.
3. If vehicle is in Wet/Rough road Mode it will
come back to Normal Mode
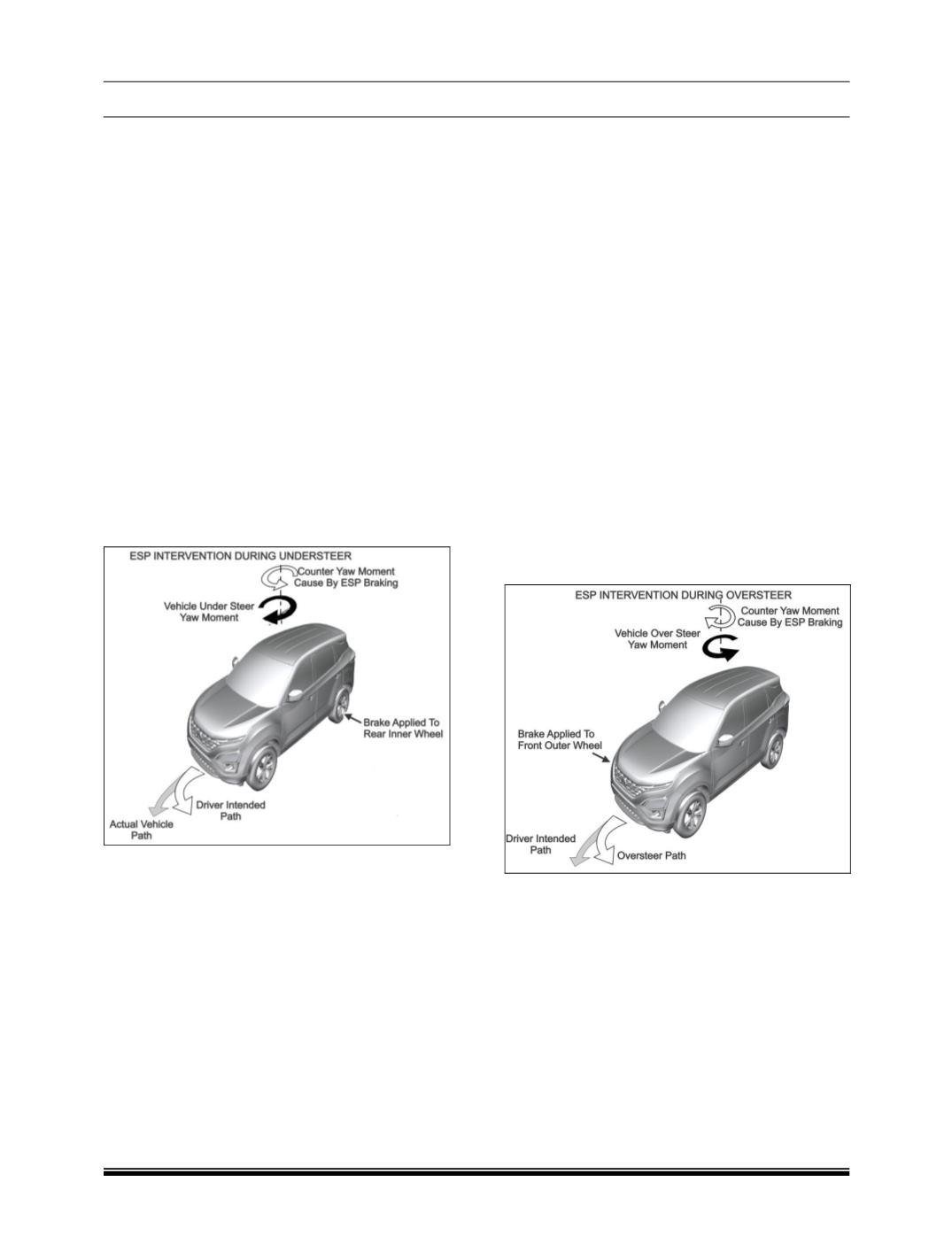
UNDERSTEER CORRECTION
Understeer is when the vehicle pushes straight
ahead rather than turning in the direction intended
by the driver. The system will react to under steer
by braking the inner rear wheel. This creates a
reactive force to stabilise the vehicle and keep it
on course.
Over steer is the opposite, i.e. when the vehicle
turns in much more than intended by the driver.
The system will react to over steer by braking the
outer front wheel.
OVERSTEER CORRECTION
Over steering is defined as a situation in which the
vehicle yaw rate exceeds the target yaw rate
given by the driver (as a result of steering wheel
Angle input). The purpose of the function is to
detect a deviation of the vehicle's yaw rate from
the target yaw rate and react accordingly,
applying Individual wheel brakes to create a
counteracting moment around the z- axis of the
vehicle. This counteracting moment is created by
braking the Rear outside and if necessary, the
front outside wheel.
NOTE
When a vehicle is taking a right turn the right side
wheels are called inner wheel and the left are
called outer wheels. Similarly when taking a left
turn the left wheels are called inner wheels and
right wheels are called outer wheels.
ESP brake control might also be combined with
reductions in the engine torque if necessary.
When ESP or TCS is active the warning lamp will
flash as an indication to the driver. During control
the driver may feel the engine power reduce or
the individual brakes being applied. The system
will support the driver within the boundaries of the
vehicle and environmental physical limits. The
ESP cannot prevent accidents that are the result
of excessive speed.