







 421 / 948
421 / 948

ELECTRONIC STABILITY PROGRAM (ESP)
2
B SPECIFICATIONS
SYSTEM DESCRIPTION
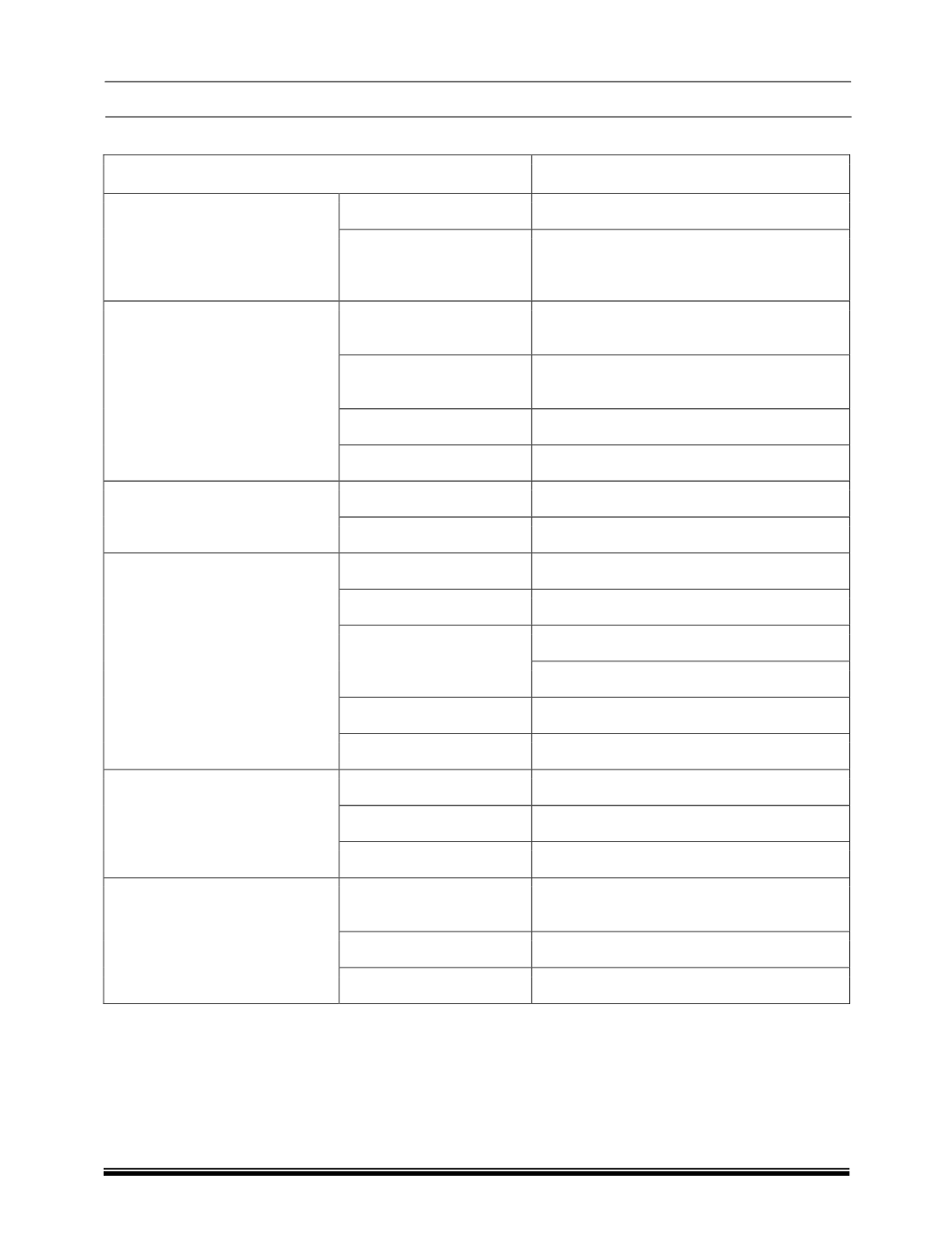
SPECIFICATIONS
General
System
ESP 9.2
Type
4 channel, 4 wheel speed sensor with
integrated Yaw rate sensor and Steering
angle sensor.
Hydraulic Control Unit (HCU)
Type
II
split
/
X- Split, with integrated pressure
sensor.
Hydraulic control method
3 modes – Pressure Increase / Hold
/Decrease
.
Type of pump
Two piston pump
Type of motor
DC
Electronic Control Unit (ECU)
Operating voltage
10-16 V
Operating temperature
- 40° C to + 105° C
Wheel Speed sensors
Type
WSS : Magneto Resistive
Resistance
High resistance > 3MΏ
Air Gap (mm)*
Front = 0.475 ~ 1.175 for 4x2
Rear = 0.375 ~ 0.875
Operating temperature
- 40° C to + 115° C
Supply Voltage
4.5V
Steering Angle sensor
Type
Non Contact, Absolute Angle sensor
Interface
CAN
Operating temperature
- 40
0
C to + 85
0
C
Integrated Yaw rate sensor
Type
Yaw rate, Lateral and Longitudinal
Acceleration.
Interface
CAN
Operating temperature
- 40
0
C to + 85
0
C
*NOTE
Air gap cannot be measured in 4x2 vehicles.